 Фронир: Оптоэлектронная продукция
Фронир: Оптоэлектронная продукция


Обзор
Вертолеты можно разделить на три категории в зависимости от их использования.: военный, полиция и гражданские. Для выполнения задачи по обнаружению и сопровождению целей в воздухе, вертолету нужна бортовая платформа и комплексная система, состоящая из средств обнаружения на платформе, который называется модулем с точки зрения аппаратного выражения.
Pod — это устройство-контейнер полезной нагрузки, подвешенное за пределами носителя движения.(например, самолет, корабль, БПЛА). По функциям встроенного оборудования, бортовые капсулы можно разделить на навигационные капсулы., модули таргетинга, инфракрасные измерительные модули, блоки электронных помех и блоки электронной разведки, и т. д..
За рубежом бурно развиваются бортовые оптико-электронные комплексы для вертолетов, особенно в разведке и предупреждении, целеуказание, управление прицеливанием и навигационным сопровождением, и т. д., которые получили широкое признание. В настоящий момент, помимо использования на вооружении разведывательных вертолетов и беспилотных самолетов-разведчиков, модуль также можно использовать для измерения целевых характеристик, моделирование фотоэлектрического управляемого оружия, и т. д.. Он также широко используется в гражданских областях, таких как проверка линий электропередачи., морская борьба с контрабандой, и экологический мониторинг.
Состав системы
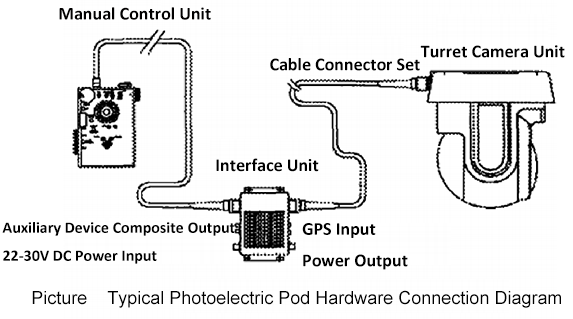
Базовый состав фотоэлектрической установки вертолета разделен на подвесную сферическую турель и бортовую систему обработки данных управления.
По аппаратному составу, в башне имеется П-образный кронштейн, сферический держатель стола, система измерения угла, система привода с электронным управлением, гироскоп, петля стабилизации гироскопа, фотодетектор, ТВ и ИК трекер и схема интерфейса, и т. д..
В принципе, башню можно разделить на две основные части: платформа стабилизации и оптико-электронная полезная нагрузка (детектор). Оптоэлектронная полезная нагрузка установлена на стабилизированной платформе., а вибрация самолета-носителя изолируется гиростабилизированной платформой для получения стабильного пространства платформы относительно инерционного пространства.. И управляется командой управления, он реализует поиск, захватывать, сопровождение и позиционирование цели оптико-электронной полезной нагрузкой. Таким образом, гиростабилизированная платформа выполняет две основные функции.: одно - пространственная стабилизация, а другое - возможность сопровождения цели. В зависимости от миссии могут использоваться различные комбинации детекторов.. Для модулей, выполняющих задачи поиска и отслеживания, они обычно включают камеры видимого или микрооптического диапазона., тепловизионные камеры, и лазерные дальномеры.
Кроме того, в соответствии с потребностями, оптико-электронная полезная нагрузка также может быть оснащена таким оборудованием, как лазерный осветитель, лазерная указка, устройство предупреждения о лазерном излучении и спектрометр изображения. Подробную информацию об их функциях и характеристиках смотрите в таблице..
| Детекторы | Функции | Характеристики |
| Лазерная указка | Направляющие управляемые бомбы, ракеты и другое оружие для поражения цели. | Он имеет большое рабочее расстояние и высокую точность индикации., что гарантирует, что управляемое оружие может совершать дальние и точные атаки. |
| Лазерное сигнальное устройство | Измерьте азимут и угол места цели.. | Точность измерения угла выше, чем у системы визуализации., используется импульсный лазерный луч, и скрытность лучше чем у РЛС. |
| Система гиперспектральной визуализации | Измеряет внутреннюю спектральную разницу между объектом и фоновыми помехами.. | Он может быстро найти цель, объем данных намного меньше, чем у обычных фотоэлектрических устройств формирования изображений, и нагрузка на обработку данных невелика. Подходит для масштабного быстрого поиска., но способность распознавания целей плохая. |
Принцип работы
Принцип работы фотоэлектрического модуля заключается в использовании датчиков изображения видимого и инфракрасного света в качестве датчика ошибки положения системы управления с обратной связью., выводить информацию об ориентации цели или информацию о внешнем наведении, и главный управляющий компьютер или вручную дайте инструкции по вращению для поиска целевой области..
После того как турель и бортовой детектор сопровождения образуют замкнутый контур сопровождения., выходные обработанные азимут и тангаж цели будут преобразованы в пропорциональный сигнал управления., который действует на крутящий момент гироскопа.
Моментный двигатель выдает управляющий момент, пропорциональный ошибкам азимута и шага, чтобы фотодетектор системы слежения мог отслеживать цель..
Кроме того, взаимное позиционирование цели также может быть реализовано путем добавления соответствующих датчиков и использования определенного модуля алгоритма. Есть два способа позиционирования: активное позиционирование и пассивное позиционирование. Активное позиционирование заключается в использовании лазерного дальномера для получения точного относительного положения и относительной скорости цели путем измерения расстояния до цели относительно самолета.; Пассивное позиционирование заключается в использовании платформы датчика измерения телевизионного/инфракрасного изображения для измерения изменения угла цели и получения приблизительного расстояния до цели..
Статус развития — на примере полицейской деятельности
Особые требования к полицейским вертолетам:
Сотрудничество вертолетов в воздухе может значительно улучшить мобильные боевые возможности и эффективность работы полиции.. В настоящий момент, полицейские вертолеты выполняют множество задач, в основном в том числе: правоохранительные органы воздушной полиции, обработка чрезвычайных ситуаций, коммуникация, командование воздушным движением, поиск и спасение, пожаротушение, официальный транспорт, сопровождение преступников и перевозка банковских наличных, неотложная медицинская помощь, сотрудничество Таможня по борьбе с контрабандой и борьбой с наркотиками, защита природных ресурсов, мониторинг окружающей среды, и т. д..
По своему специальному назначению, полицейские вертолеты должны отвечать следующим требованиям:
1.Скорость полета не высокая., но характеристики полета на малой скорости и висения лучше;
2. В основном взлетают и приземляются в узких местах, таких как здания., долины, джунгли, водные поверхности, болота, платформы, и т. д., и иметь хорошую скороподъемность;
3. Иметь возможность летать ночью в сложных погодных условиях., и может нормально летать при высокой температуре (50°С), плато, холодная зона (-40°С), сильный ветер (более 40 кун) и морская среда с высокой температурой;
4. Иметь условия для установки полицейской техники;
5. Максимальная дальность полета не может быть менее 500 км.
Оборудование для обнаружения и слежения за полицейскими вертолетами:
Для выполнения поставленных задач полицейский вертолет, здесь должно быть установлено специальное оборудование, включая оборудование связи, навигационное оборудование, оборудование для наблюдения, спасательное оборудование, оборудование для неотложной медицинской помощи, противопожарное оборудование, грузовое оборудование и вспомогательное оборудование. Бортовой фотоэлектрический модуль является ключевым оборудованием полицейского вертолета.. Он может патрулировать и контролировать днем и ночью., фотографировать и собирать доказательства в любое время и передавать информацию в наземный командный центр. Он может выполнять поворотный поиск на 360° и находить цели на большом расстоянии.. Кроме того, вертолет также оснащен GPS и электронными картами., который может определить точное местоположение убегающего автомобиля на местности. Оснащен высокочастотными и сверхвысокочастотными радиостанциями., полицейские радиостанции, транспондеры, радиокомпас и другое оборудование связи и навигации., он может поддерживать связь с наземным командным центром в любое время.
Тенденция развития
1. Улучшение производительности детектора
Производительность обнаружения и отслеживания модуля зависит от производительности полезной нагрузки., то есть, детектор, например, эффективное расстояние обнаружения, точность обнаружения, и способность противостоять суровым условиям окружающей среды. Эти технологии все еще развиваются в направлении высокой точности., миниатюризация, и оцифровка. Основное внимание в разработке уделяется технологии инфракрасной визуализации.. Оборудование инфракрасной визуализации, ориентированное на военные нужды, относительно дорого., а экспорт техники с высокими показателями строго ограничен.
2. Комбинация обнаружения сигналов
Фотоэлектрическое комплексное оборудование для разведки и обнаружения часто объединяет несколько сенсорных технологий, таких как видимый свет., Приглушенный свет, инфракрасный, и лазер. Общим требованием к фотоэлектрической интегрированной системе является максимально возможное использование общей оптической системы для комплексной стабилизации., и использовать общую систему сопровождения цели и компенсации движения изображения. Разработка фотоэлектрической интегрированной системы обнаружения и слежения должна решить сопутствующие технические проблемы, такие как материалы для окон и оптические пленки..
3. Модуляризация полезной нагрузки
Функция фотоэлектрической системы становится все сильнее и сильнее, и доля системы в общей стоимости вертолета неуклонно растет. Радар, инфракрасный, цифровое изображение, позиционирование и навигация, постепенно добавляются автопилот и двигатель с числовым программным управлением, но место для бортовой платформы гиростабилизации ограничено. Поэтому, пользователям необходимо гибко настраивать полезную нагрузку в соответствии со своими конкретными потребностями. Бортовую оптико-электронную систему необходимо развивать в направлении функциональной интеграции., маленький размер, легкий вес и миниатюризация.
4. Разработка информации в реальном времени
Расстояние изображения и другая информация, обнаруженная бортовой системой, должна быть своевременно передана в наземный центр управления системой связи.. Бортовая система связи обычно использует оборудование радиосвязи «воздух-земля» или оборудование спутниковой связи.. Противоречие между объемом передаваемых данных и требованиями реального времени становится все более заметным.. С одной стороны, линия связи необходима для расширения полосы частот и увеличения пропускной способности передачи информации. С другой стороны, система модуля должна выполнить соответствующую внешнюю обработку перед передачей сигнала, например, комплексная обработка сигналов цифрового изображения, информационный синтез, и т. д..
Ссылка: Венкуй Ли, Джунпу Ван, Чжихуа Цзинь, Вэйфэн Тянь. Разработка и противодействие бортовым оптоэлектронным модулям.[Дж]. Журнал китайских инерционных технологий,2004,12(5):75-80