 프로니르: 광전자 제품
프로니르: 광전자 제품


개요
헬리콥터는 용도에 따라 세 가지 범주로 나눌 수 있습니다.: 군대, 경찰과 민간인. 공중의 표적을 탐지하고 추적하는 임무를 완수하기 위해, 헬리콥터에는 공중 플랫폼과 플랫폼의 탐지 장비로 구성된 통합 시스템이 필요합니다., 하드웨어적인 표현으로는 포드(Pod)라고 불리는 것입니다..
포드(Pod)는 모션 캐리어 외부에 매달린 포드 페이로드 컨테이너 장치입니다.(예를 들어, 항공기, 배, 무인항공기). 내장 장비의 기능에 따라, 공중 포드는 네비게이션 포드로 나눌 수 있습니다, 타겟팅 포드, 적외선 측정 포드, 전자 전파 방해 포드 및 전자 정보 포드, 등.
헬리콥터 공중 광전자 포드는 해외에서 빠르게 발전하고 있습니다., 특히 정찰과 경고에 있어서, 목표 표시, 조준 및 탐색 추적 제어, 등., 널리 평가받았던 것. 현재, 무장정찰헬기, 무인정찰기 등에 활용되는 것 외에, 포드는 목표 특성 측정에도 사용할 수 있습니다., 광전 유도 무기 시뮬레이션, 등. 전력선 점검 등 민간분야에서도 널리 사용됩니다., 해상 밀수 방지, 환경 모니터링.
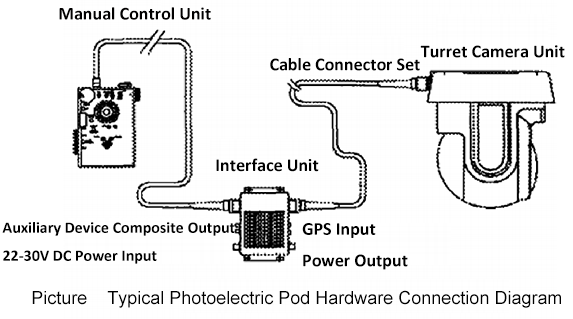
시스템 구성
헬리콥터 광전 포드의 기본 구성은 매달린 구형 포탑과 온보드 디스플레이 제어 처리 시스템으로 구분됩니다.
하드웨어 구성 측면에서, 포탑에는 U자형 브래킷이 포함되어 있습니다., 구형 테이블 캐리어, 각도 측정 시스템, 전자 제어 구동 시스템, 자이로스코프, 자이로스코프 안정화 루프, 광검출기, TV 및 IR 추적기와 인터페이스 회로, 등.
원칙적으로, 포탑은 두 가지 주요 부분으로 나눌 수 있습니다: 안정화 플랫폼과 광전자 페이로드 (탐지기). 광전자 페이로드는 안정된 플랫폼에 장착됩니다., 그리고 캐리어 항공기의 진동은 자이로 안정화 플랫폼에 의해 격리되어 관성 공간에 비해 안정적인 플랫폼 공간을 얻습니다.. 그리고 제어 명령에 의해 구동, 검색을 실현합니다, 포착, 광전자 페이로드를 통한 표적 추적 및 위치 확인. 따라서 자이로 안정화 플랫폼은 두 가지 주요 기능을 달성합니다.: 하나는 공간 안정화이고, 다른 하나는 표적을 추적하는 능력이다.. 임무에 따라 다양한 탐지기 조합을 사용할 수 있습니다.. 검색 및 추적 작업을 수행하는 포드의 경우, 일반적으로 가시광선 카메라 또는 미세 광학 카메라가 포함됩니다., 열화상 카메라, 그리고 레이저 거리 측정기.
게다가, 필요에 따라, 광전자 페이로드에는 레이저 조명 장치와 같은 장비도 장착할 수 있습니다., 레이저 포인터, 레이저 경고 장치 및 이미지 분광계. 기능과 특성에 대한 자세한 내용은 표를 참조하세요..
| 감지기 | 기능 | 형질 |
| 레이저 포인터 | 가이드 유도 폭탄, 표적을 타격하기 위한 미사일 및 기타 무기. | 작동 거리가 길고 표시 정확도가 높습니다., 유도무기가 장거리 및 정확한 공격을 완료할 수 있도록 보장합니다.. |
| 레이저 경고 장치 | 타겟의 방위각과 고도각을 측정합니다.. | 각도 측정 정확도는 이미징 시스템보다 높습니다., 펄스 레이저 빔이 사용됩니다., 레이더보다 은폐력이 더 좋아. |
| 초분광 이미징 시스템 | 대상과 배경 클러터 간의 고유 스펙트럼 차이를 측정합니다.. | 대상을 빠르게 찾을 수 있습니다, 일반 광전 이미징 장치에 비해 데이터 양이 훨씬 적습니다., 데이터 처리 부담이 적습니다.. 대규모의 빠른 검색에 적합합니다., 하지만 타겟 인식 능력이 좋지 않습니다.. |
작동 원리
광전 포드의 작동 원리는 가시광선 및 적외선 이미징 센서를 폐쇄 루프 제어 시스템의 위치 오류 센서로 사용하는 것입니다., 목표지향정보 또는 외부유도정보 출력, 주요 제어 컴퓨터 또는 수동으로 회전 명령을 제공하여 대상 영역을 검색합니다..
포탑과 온보드 추적 감지기가 폐쇄 루프 추적을 형성한 후, 출력 처리된 목표 방위각 및 피치 편차는 비례 제어 신호로 변환됩니다., 자이로스코프의 토커에 작용하는 것.
토크 모터는 추적 프레임의 광검출기가 표적을 추적할 수 있도록 방위각 및 피치 오차에 비례하는 제어 토크를 출력합니다..
게다가, 해당 센서를 추가하고 특정 알고리즘 포드를 사용하여 대상의 상대적 위치 지정을 실현할 수도 있습니다.. 위치를 잡는 방법은 2가지가 있습니다: 능동 포지셔닝과 패시브 포지셔닝. 능동 포지셔닝은 레이저 거리 측정기를 사용하여 항공기에 대한 표적의 거리를 측정하여 정확한 표적 상대 위치와 상대 속도를 얻는 것입니다.; 수동 측위는 TV/적외선 이미징 측정 센서 플랫폼을 사용하여 대상의 각도 변화를 측정하여 대략적인 대상 거리를 얻는 것입니다..
개발 현황 - 경찰 분야를 예로 들어
경찰 헬리콥터에 대한 특별 요구 사항:
공중 헬리콥터의 협력은 경찰의 기동 전투 능력과 사건 처리 효율성을 크게 향상시킬 수 있습니다.. 현재, 경찰 헬리콥터는 많은 임무를 수행합니다, 주로 포함: 항공 경찰 법 집행, 긴급 상황 처리, 의사소통, 항공교통사령부, 수색 및 구출, 소방, 공식 교통, 범죄자 호송 및 은행현금운송, 응급 의료 구조, 협력 세관 밀수 및 마약 방지, 천연자원 보호, 환경 모니터링, 등.
특별한 목적에 따라, 경찰 헬리콥터는 다음 요구 사항을 충족해야합니다:
1.비행 속도는 높지 않습니다., 하지만 저속 비행과 호버링 성능은 더 좋습니다.;
2. 주로 건물 등 좁은 장소에서 이착륙을 한다., 계곡, 정글, 수면, 늪, 플랫폼, 등., 그리고 좋은 상승률을 가지고 있어요;
3. 복잡한 기상 조건에서도 밤에 비행할 수 있는 능력을 갖추고 있습니다., 고온에서도 정상적으로 비행할 수 있습니다. (50℃), 고원 추운 지역 (-40℃), 강한 바람 (40kn 이상) 및 해양 고온 환경;
4. 경찰 장비 설치 조건을 갖추고 있습니다.;
5. 최대 비행 거리는 다음보다 작을 수 없습니다. 500 킬로미터.
경찰 헬리콥터 탐지 및 추적 장비:
경찰헬기에게 맡겨진 임무를 완수하기 위해, 특수 장비를 설치해야 합니다., 통신장비를 포함한, 항법 장비, 관측 장비, 구조 장비, 응급 의료 장비, 소방 장비, 화물 장비 및 지원 장비. The airborne photoelectric pod is the key equipment of the police helicopter. It can patrol and monitor day and night, take pictures and collect evidence at any time and transmit the information to the ground command center. It can perform 360° rotary search and find targets at a long distance. 게다가, the helicopter is also equipped with GPS and electronic maps, which can determine the exact location of the escaping vehicle on the ground. Equipped with high-frequency and very high-frequency radio stations, police radio stations, transponders, radio compass and other communication and navigation equipment, it can keep in touch with the ground command center at any time.
Development Trend
1. Improving Detector Performance
The detection and tracking performance of the pod depends on the performance of the payload, 그건, 탐지기, 유효 감지 거리 등, 탐지 정확도, 가혹한 환경에 저항하는 능력. 이들 기술은 아직도 고정밀화 방향으로 발전하고 있습니다., 소형화, 그리고 디지털화. 개발의 초점은 주로 적외선 이미징 기술입니다. 군용으로 유도되는 적외선 영상 장비는 상대적으로 가격이 비싸다., 지표가 높은 장비의 수출은 엄격히 제한됩니다..
2. 신호 감지의 결합
광전식 종합 정찰 및 탐지 장비는 가시광선과 같은 여러 감지 기술을 통합하는 경우가 많습니다., 저조도, 적외선, 그리고 레이저. 광전 집적 시스템의 일반적인 요구 사항은 포괄적인 안정화를 위해 가능한 한 공통 광학 시스템을 사용하는 것입니다., 공통 목표 추적 및 이미지 모션 보상 시스템을 사용합니다.. 광전 집적 검출 및 추적 시스템 개발은 창재, 광학필름 등 관련 기술적인 문제를 해결해야 함.
3. 페이로드 모듈화
광전 시스템의 기능은 점점 더 강력해지고 있습니다., 헬리콥터의 전체 비용에서 시스템이 차지하는 비중은 꾸준히 증가하고 있습니다.. 레이더, 적외선, 디지털 이미지, 포지셔닝 및 내비게이션, 자동 조종 장치 및 수치 제어 엔진이 점차 추가됩니다., 그러나 공중 자이로 안정화 플랫폼을 위한 공간은 제한되어 있습니다.. 그러므로, 사용자는 특정 요구 사항에 따라 페이로드를 유연하게 구성해야 합니다.. 공중 광전자 시스템은 기능 통합 방향으로 발전해야합니다, 작은 크기, 경량화 및 소형화.
4. 실시간 정보 개발
항공 시스템에서 감지한 이미지 거리 및 기타 정보는 통신 시스템을 통해 적시에 지상 관제 센터로 전송되어야 합니다.. 항공통신체계는 일반적으로 공대지 무선통신장비나 위성통신장비를 채택한다.. 전송되는 데이터의 양과 실시간 요구 사항 간의 모순이 점점 더 두드러지고 있습니다.. 한편으로는, 주파수 대역을 넓히고 정보 전송 용량을 늘리려면 통신 링크가 필요합니다.. 반면에, 포드 시스템은 신호 전송 전에 해당 프런트엔드 처리를 수행해야 합니다., 디지털 영상 신호의 종합 처리 등, 정보융합, 등.
참조: 리 웬쿠이, 왕준푸, 진 지화, Weifeng Tian. 공중 광전자공학 포드의 개발 및 대응책[제이]. 중국 관성 기술 저널,2004,12(5):75-80