 フロニール: オプトエレクトロニクス製品
フロニール: オプトエレクトロニクス製品


概要
ヘリコプターは用途に応じて3つに分類されます: 軍隊, 警察と民間人. 空中の目標を検出して追跡するタスクを完了するには, ヘリコプタには空中プラットフォームと、プラットフォーム上の検出装置で構成される統合システムが必要です, ハードウェア表現ではポッドと呼ばれるもの.
ポッドは、モーション キャリアの外側に吊り下げられたポッド ペイロード コンテナ デバイスです。(例えば, 航空機, 船, 無人航空機). 内蔵機器の機能に応じて, 空挺ポッドはナビゲーション ポッドに分割できます, ポッドのターゲティング, 赤外線測定ポッド, 電子ジャミングポッドと電子インテリジェンスポッド, 等.
ヘリコプターの空中光電子ポッドは海外で急速に開発されている, 特に偵察と警告において, 目標の表示, 照準とナビゲーション追跡を制御する, 等, 広く評価されてきたもの. 現在のところ, 武装偵察ヘリコプターや無人偵察機に使用されるほか、, ポッドはターゲットの特性測定にも使用できます, 光電誘導兵器シミュレーション, 等. 送電線の検査など民生分野でも幅広く使用されています, 海上密輸防止, および環境モニタリング.
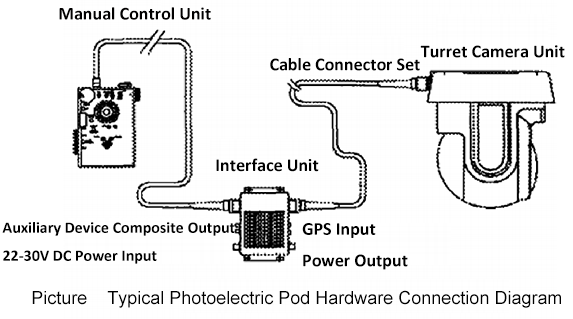
システム構成
ヘリコプタ光電ポッドの基本構成は、吊り下げ球形タレットと搭載ディスプレイ制御処理システムに分けられます。
ハードウェア構成的には, タレットにはU字型ブラケットが含まれています, 球面テーブルキャリア, 角度測定システム, 電子制御駆動システム, ジャイロスコープ, ジャイロスコープ安定化ループ, 光検出器, TVおよびIRトラッカーおよびインターフェース回路, 等.
原則として, 砲塔は 2 つの主要な部分に分割できます: 安定化プラットフォームと光電子ペイロード (探知機). 光電子ペイロードは安定したプラットフォームに取り付けられています, 艦載機の振動はジャイロ安定化プラットフォームによって隔離され、慣性空間に対して安定したプラットフォーム空間が確保されます。. そして制御コマンドによって駆動されます, それは検索を実現します, 捕獲, 光電子ペイロードによるターゲットの追跡と位置決め. したがって、ジャイロ安定化プラットフォームは 2 つの主要な機能を実現します。: 1 つは空間の安定化、もう 1 つはターゲットを追跡する機能です。. ミッションに応じて検出器のさまざまな組み合わせを使用可能. 検索および追跡タスクを実行するポッドの場合, 通常、可視カメラまたは超小型光学カメラが含まれます。, 熱画像カメラ, レーザー距離計と.
加えて, ニーズに応じて, 光電子ペイロードにはレーザー照明器などの機器を装備することもできます, レーザーポインター, レーザー警報装置および画像分光計. 機能と特徴の詳細は表を参照してください。.
| 検出器 | 機能 | 特徴 |
| レーザーポインター | 誘導誘導爆弾, 標的を攻撃するためのミサイルやその他の兵器. | 作動距離が長く、指示精度が高い, これにより、誘導兵器による長距離かつ正確な攻撃が可能になります。. |
| レーザー警報装置 | ターゲットの方位角と仰角を測定します. | 撮像系よりも角度測定精度が高い, パルスレーザー光線が使用される, 隠蔽性はレーダーよりも優れています. |
| ハイパースペクトルイメージングシステム | ターゲットと背景のクラッターの間の固有のスペクトルの差を測定します. | 素早くターゲットを発見できる, 一般的な光電撮像素子に比べてデータ量が大幅に少ない, データ処理の負担が少ない. 大規模な高速検索に適しています, ただし対象認識能力は低い. |
動作原理
光電ポッドの動作原理は、可視光および赤外光イメージング センサーを閉ループ制御システムの位置エラー センサーとして使用することです。, 目標姿勢情報または外部誘導情報を出力する, メイン制御コンピュータと手動で回転指示を与えてターゲットエリアを探索します.
タレットとオンボード追跡検出器が閉ループ追跡を形成した後, 出力処理されたターゲット方位とピッチ偏差は比例制御信号に変換されます。, ジャイロスコープのトルクに作用する.
トルク モーターは、方位角誤差とピッチ誤差に比例する制御トルクを出力し、追跡フレームの光検出器がターゲットを追跡できるようにします。.
加えて, ターゲットの相対位置は、対応するセンサーを追加し、特定のアルゴリズム ポッドを使用することによっても実現できます。. 位置決めには2つの方法があります: アクティブ測位とパッシブ測位. アクティブ測位は、レーザー距離計を使用して、航空機に対するターゲットの距離を測定することにより、正確なターゲットの相対位置と相対速度を取得します。; パッシブ測位は、TV/赤外線画像測定センサープラットフォームを使用してターゲットの角度変化を測定し、大まかなターゲット距離を取得します。.
開発状況——警察分野を例に
警察ヘリコプターの特別要件:
空中でのヘリコプターの協力は、警察の機動戦闘能力と事件処理効率を大幅に向上させることができます。. 現在のところ, 警察のヘリコプターは多くの任務を遂行します, 主に含む: 空警察の法執行機関, 緊急事態への対応, コミュニケーション, 航空交通司令部, 捜索と救助, 消防, 公的な輸送手段, 犯罪者の護送と銀行の現金輸送, 緊急医療救助, 税関の密輸対策と麻薬対策への協力, 天然資源の保護, 環境の監視, 等.
その特別な目的に従って, 警察のヘリコプターは次の要件を満たしている必要があります:
1.飛行速度は速くない, ただし、低速飛行とホバリング性能は優れています。;
2. 主に建物など狭い場所での離着陸, 谷, ジャングル, 水面, 沼地, プラットフォーム, 等, そして上昇率も良い;
3. 複雑な気象条件下でも夜間飛行が可能, 高温でも正常に飛行できます (50℃), 高原寒冷地 (-40℃), 強い風 (40knを超える) 海洋高温環境;
4. 警察の装備を設置するための条件を備えている;
5. 最大飛距離はそれ以下にすることはできません 500 km.
警察ヘリコプターの探知および追跡装置:
警察のヘリコプターから委託された任務を遂行するため, 特別な装置を設置する必要がある, 通信機器も含めて, ナビゲーション装置, 観測装置, 救助用具, 救急医療機器, 消火機器, 貨物機器および支援機器. 空中光電ポッドは警察ヘリコプターの主要装備です. 昼夜問わず巡回・監視が可能, いつでも写真を撮って証拠を収集し、情報を地上指令センターに送信します. 360°回転探索を実行し、遠距離の目標を見つけることができます. 加えて, ヘリコプターにはGPSと電子地図も装備されています, 地上で逃走車両の正確な位置を特定できる. 高周波および超短波無線局を搭載, 警察無線局, トランスポンダー, 無線コンパスおよびその他の通信およびナビゲーション機器, いつでも地上指令センターと連絡を取り合うことができます.
開発動向
1. 検出器の性能の向上
ポッドの検出と追跡のパフォーマンスはペイロードのパフォーマンスに依存します, あれは, 探知機, 有効検出距離など, 検出精度, 過酷な環境に耐える能力. これらの技術は現在も高精度化に向けて発展を続けています, 小型化, そしてデジタル化. 開発の焦点は主に赤外線イメージング技術です. 軍事ニーズに基づいた赤外線画像装置は比較的高価です, 高い指標を持つ機器の輸出は厳しく制限されています.
2. 信号検出の組み合わせ
光電式の包括的な偵察および探知装置には、可視光などの複数のセンシング技術が統合されていることがよくあります。, 弱い光, 赤外線, そしてレーザー. 光電統合システムの一般的な要件は、包括的な安定化のために可能な限り共通の光学系を使用することです。, 共通のターゲット追跡および画像動き補償システムを使用する. 光電統合検出・追跡システムの開発には、窓材や光学フィルムなどの関連技術課題を解決する必要がある.
3. ペイロードのモジュール化
光電システムの機能はますます強化されています, そしてヘリコプターの総コストに占めるシステムの割合は着実に上昇している. レーダー, 赤外線, デジタル画像, 測位とナビゲーション, 自動操縦と数値制御エンジンが段階的に追加される, しかし、空中ジャイロ安定化プラットフォームのスペースは限られています. したがって, ユーザーは特定のニーズに応じてペイロードを柔軟に構成する必要がある. 航空光電子システムは機能統合の方向に発展する必要がある, 小さいサイズ, 軽量化と小型化.
4. リアルタイム情報の開発
航空機システムによって検出された画像距離およびその他の情報は、通信システムによって適時に地上管制センターに送信される必要があります。. 航空通信システムは、一般に空対地無線通信装置または衛星通信装置を採用します。. 送信データ量とリアルタイム要件との矛盾がますます顕著になっている. 一方では, 通信リンクは周波数帯域を広げ、情報伝送容量を増やす必要がある. 一方で, ポッド システムは、信号送信前に対応するフロントエンド処理を実行する必要があります。, デジタル映像信号の総合処理など, 情報融合, 等.
参照: リー・ウェンクイ, 王淳風, ジン・ジーファ, 天威峰 .空中光電子ポッドの開発と対策[J]. 中国慣性技術ジャーナル,2004,12(5):75-80