 Fronir: Opto-electronic Products
Fronir: Opto-electronic Products


Overview
Helicopters can be divided into three categories according to their uses: military, police and civilian. To complete the task of detecting and tracking targets in the air, a helicopter needs an airborne platform and an integrated system composed of detection equipment on the platform, which is called a pod in terms of hardware expression.
Pod is a pod payload container device suspended outside the motion carrier(e.g., aircraft, ship, UAV). According to the functions of built-in equipment, airborne pods can be divided into navigation pods, targeting pods, infrared measurement pods, electronic jamming pods and electronic intelligence pods, etc.
Helicopter airborne optoelectronic pods are developing rapidly abroad, especially in reconnaissance and warning, target indication, control aiming and navigation tracking, etc., which have been widely valued. At present, in addition to being used for armed reconnaissance helicopters and unmanned reconnaissance aircraft, the pod can also be used for target characteristic measurement, photoelectric guided weapon simulation, etc. It is also widely used in civilian fields such as power line inspection, maritime anti-smuggling, and environmental monitoring.
System Composition
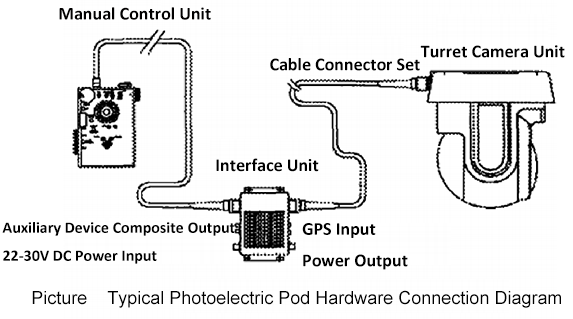
The basic composition of the helicopter photoelectric pod is divided into hanging spherical turret and onboard display control processing system
In terms of hardware composition, the turret includes U-shaped bracket, spherical table carrier, angle measurement system, electronically controlled drive system, gyroscope, gyroscope stabilization loop, photodetector, TV and IR tracker and interface circuit, etc.
In principle, the turret can be divided into two main parts: the stabilization platform and the optoelectronic payload (the detector). The optoelectronic payload is mounted on a stabilized platform, and the vibration of the carrier aircraft is isolated by the gyro-stabilized platform to obtain a stable platform space relative to the inertial space. And driven by the control command, it realizes the search, capture, tracking and positioning of the target by the optoelectronic payload. Thus the gyro-stabilized platform achieves two major functions: one is spatial stabilization and the other is the ability to track the target. Different combinations of detectors can be used depending on the mission. For pods that perform search and tracking tasks, they typically include visible or micro-optical cameras, thermal imaging cameras, and laser range finders.
In addition, according to the needs, the optoelectronic payload can also be equipped with equipment such as laser illuminator, laser pointer, laser warning device and image spectrometer. See the table for details of their functions and characteristics.
| Detectors | Functions | Characteristics |
| Laser pointer | Guide guided bombs, missiles and other weapons to hit the target. | It has a long working distance and high indication accuracy, which ensures that guided weapons can complete long-distance and accurate attacks. |
| Laser warning device | Measure the azimuth and elevation angle of the target. | The angle measurement accuracy is higher than that of the imaging system, the pulsed laser beam is used, and the concealment is better than that of the radar. |
| Hyperspectral imaging system | Measures the intrinsic spectral difference between the target and background clutter. | It can quickly find the target, the amount of data is much less than that of ordinary photoelectric imaging devices, and the burden of data processing is small. It is suitable for large-scale fast search, but the target recognition ability is poor. |
Working Principle
The working principle of the photoelectric pod is to use visible light and infrared light imaging sensors as the position error sensor of the closed-loop control system, output target orientation information or external guidance information, and the main control computer or manually give rotation instructions to search the target area.
After the turret and the on-board tracking detector form a closed-loop tracking, the output processed target azimuth and pitch deviation will be converted into a proportional control signal, which acts on the torquer of the gyroscope.
The torque motor outputs a control torque that is proportional to the azimuth and pitch errors so that the photodetector of the tracking frame can keep track of the target.
In addition, the relative positioning of the target can also be realized by adding corresponding sensors and using a certain algorithm pod. There are two ways of positioning: active positioning and passive positioning. Active positioning is to use laser rangefinder to obtain accurate target relative position and relative speed by measuring the distance of the target relative to the aircraft; passive positioning is to use TV/infrared imaging measurement sensor platform to measure the angle change of the target to obtain a rough target distance.
Development Status——Taking the Police Field as an Example
Special requirements for police helicopters:
The cooperation of helicopters in the air can greatly improve the mobile combat capability and case handling efficiency of the police force. At present, police helicopters undertake many tasks, mainly including: air police law enforcement, handling emergencies, communication, air traffic command, search and rescue, fire fighting, official transportation, escorting criminals and bank cash transportation, emergency medical rescue, cooperation Customs anti-smuggling and anti-narcotics, protection of natural resources, monitoring the environment, etc.
According to its special purpose, police helicopters should meet the following requirements:
1.The flight speed is not high, but the low-speed flight and hover performance are better;
2. Mainly take off and land in narrow places such as buildings, valleys, jungles, water surfaces, swamps, platforms, etc., and have a good rate of climb;
3. Have the ability to fly at night under complex weather conditions, and can fly normally in high temperature (50°C), plateau cold area (-40°C), strong wind (greater than 40kn) and offshore high temperature environment;
4. Have the conditions for installing police equipment;
5. The maximum flight distance cannot be less than 500 km.
Police helicopter detection and tracking equipment:
In order to complete the tasks entrusted by the police helicopter, it must install special equipment, including communication equipment, navigation equipment, observation equipment, rescue equipment, emergency medical equipment, fire fighting equipment, cargo equipment and support equipment. The airborne photoelectric pod is the key equipment of the police helicopter. It can patrol and monitor day and night, take pictures and collect evidence at any time and transmit the information to the ground command center. It can perform 360° rotary search and find targets at a long distance. In addition, the helicopter is also equipped with GPS and electronic maps, which can determine the exact location of the escaping vehicle on the ground. Equipped with high-frequency and very high-frequency radio stations, police radio stations, transponders, radio compass and other communication and navigation equipment, it can keep in touch with the ground command center at any time.
Development Trend
1. Improving Detector Performance
The detection and tracking performance of the pod depends on the performance of the payload, that is, the detector, such as effective detection distance, detection accuracy, and ability to resist harsh environments. These technologies are still developing in the direction of high precision, miniaturization, and digitization. The focus of development is mainly infrared imaging technology. Infrared imaging equipment guided by military needs is relatively expensive, and the export of equipment with high indicators is strictly restricted.
2. Combination of Signal Detection
Photoelectric comprehensive reconnaissance and detection equipment often integrates several sensing technologies such as visible light, low light, infrared, and laser. The general requirement for the photoelectric integrated system is to use a common optical system as much as possible for comprehensive stabilization, and to use a common target tracking and image motion compensation system. The development of a photoelectric integrated detection and tracking system needs to solve related technical problems such as window materials and optical films.
3. Payload Modularization
The function of the photoelectric system is getting stronger and stronger, and the proportion of the system to the total cost of the helicopter has been rising steadily. Radar, infrared, digital image, positioning and navigation, autopilot and numerical control engine are gradually added, but the space for the airborne gyro stabilization platform is limited. Therefore, users need to flexibly configure the payload according to their specific needs. The airborne optoelectronic system needs to develop in the direction of functional integration, small size, light weight and miniaturization.
4. Developing Real-Time Information
The image distance and other information detected by the airborne system needs to be transmitted to the ground control center in time by the communication system. The airborne communication system generally adopts air-to-ground radio communication equipment or satellite communication equipment. The contradiction between the amount of transmitted data and real-time requirements is becoming increasingly prominent. On the one hand, the communication link is required to widen the frequency band and increase the information transmission capacity. On the other hand, the pod system is required to perform corresponding front-end processing before signal transmission, such as comprehensive processing of digital image signals, information fusion, etc.
Reference: Wenkui Li, Junpu Wang, Zhihua Jin, Weifeng Tian .Development and Countermeasure of Airborne Optoelectronic Pods[J]. Journal of Chinese Inertial Technology,2004,12(5):75-80